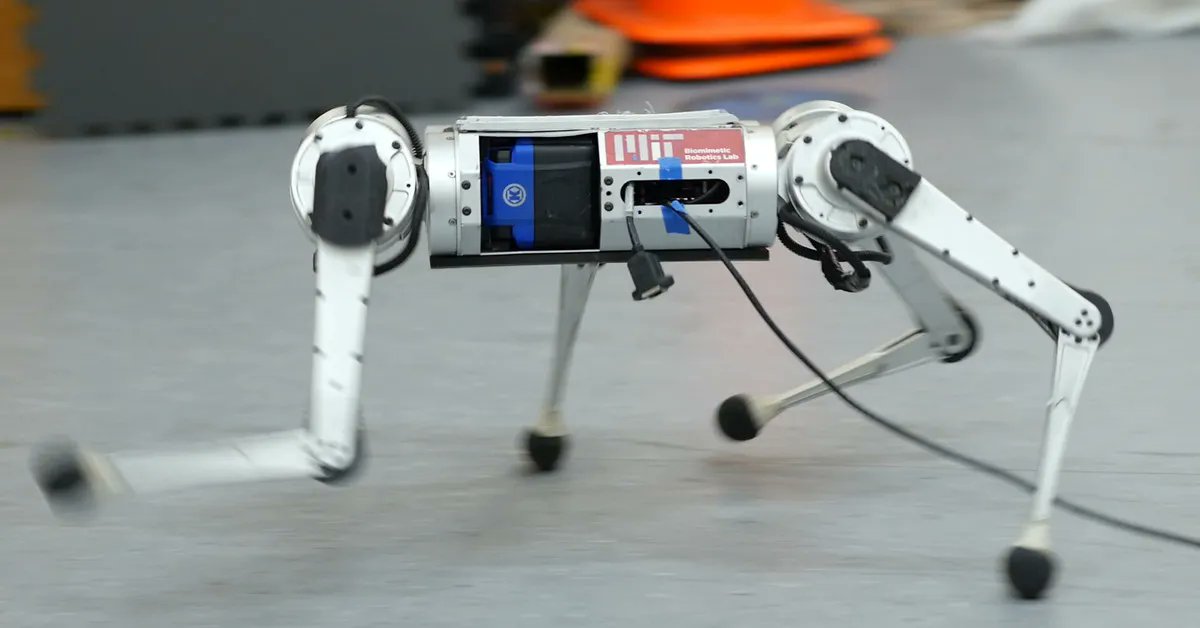
AI can help develop methods of locomotion that are unconventional but fast
Quadrupedal robots are becoming a familiar sight, but engineers are still working out the full capabilities of these machines. Now, a group of researchers from MIT says one way to improve their functionality might be to use AI to help teach the bots how to walk and run.
Usually, when engineers are creating the software that controls the movement of legged robots, they write a set of rules about how the machine should respond to certain inputs. So, if a robot’s sensors detect x amount of force on leg y, it will respond by powering up motor a to exert torque b, and so on. Coding these parameters is complicated and time-consuming, but it gives researchers precise and predictable control over the robots.
An alternative approach is to use machine learning — specifically, a method known as reinforcement learning that functions through trial and error. This works by giving your AI model a goal known as a “reward function” (e.g., move as fast as you can) and then letting it loose to work out how to achieve that outcome from scratch. This takes a long time, but it helps if you let the AI experiment in a virtual environment where you can speed up time. It’s why reinforcement learning, or RL, is a popular way to develop AI that plays video games.
Mots-clés : cybersécurité, sécurité informatique, protection des données, menaces cybernétiques, veille cyber, analyse de vulnérabilités, sécurité des réseaux, cyberattaques, conformité RGPD, NIS2, DORA, PCIDSS, DEVSECOPS, eSANTE, intelligence artificielle, IA en cybersécurité, apprentissage automatique, deep learning, algorithmes de sécurité, détection des anomalies, systèmes intelligents, automatisation de la sécurité, IA pour la prévention des cyberattaques.